Simmy gets physical!
A few years ago I spent some time in Germany and gave a talk on AI at the University of Applied Science in Frankfurt-am-Main. At their AI lab they had a Fraunhofer Volksbot (www.volksbot.de) which they were using to do some experiments on. I was very impressed by the work done by the Intelligent Systems team at Barrierefreie Systeme (BaSys) at the university.
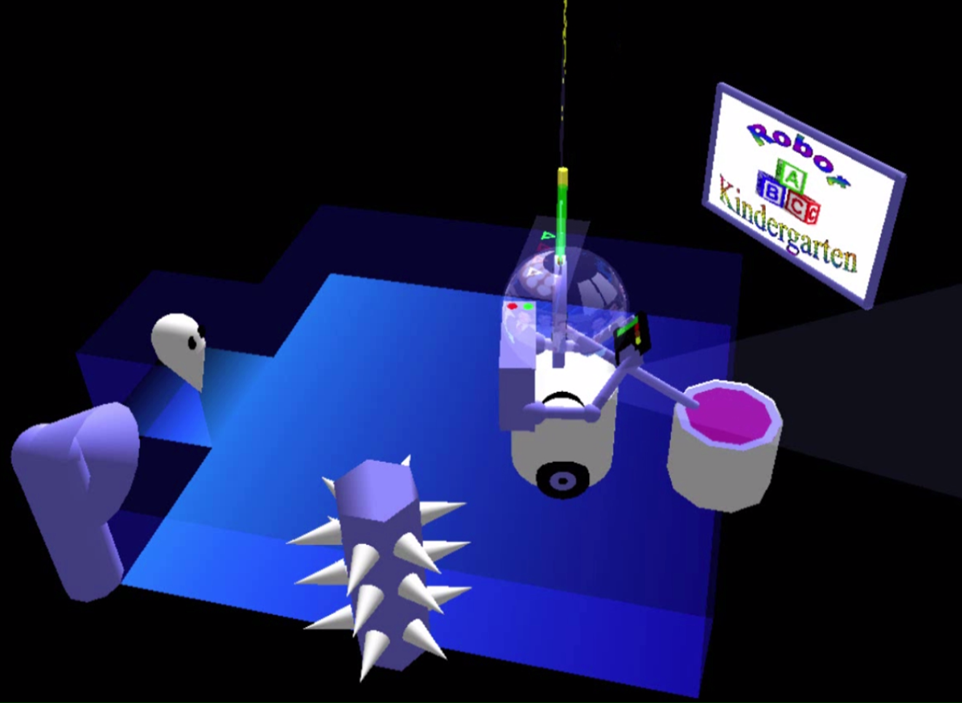
We looked at the option of modifying the Fraunhofer Volkbot robot into an Xzistor Robot that can learn some emergent behaviours in a type of ‘Robot Kindergarten’ by looking at shapes and images on a TV screen, and I did a quick modification of my Simmy 3D simulation to illustrate how this could be achieved. You can see some videos of the ‘Robot Kindergarten’ simulation here.

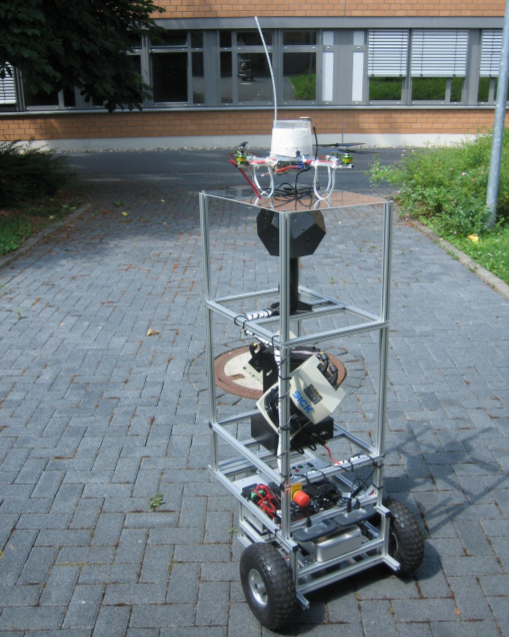
A typical Volksbot configuration with onboard laptop and omni-directional camera.
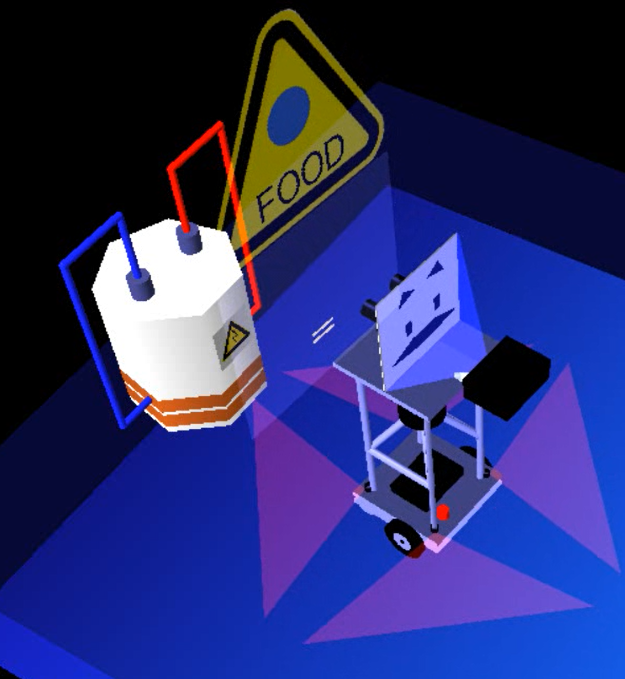
I basically just dropped the basic geometry of the BaSyS version of the Volksbot into my 3D simulation. Then I added virtual components so that their Volksbot could have senses e.g tactile (see red laser proximity sensor patterns on the floor) and also can show emotion through facial expressions using a small projector and screen.
I changed the food source to an electricity supply (battery) to which the Volksbot will learn to navigate when its power runs low (same like ‘hunger’). The 3D simulation worked well and I made it to alternate between the robot configuration they actually had at the lab and what I proposed it could be enhanced into (every 30 seconds).
See the screengrabs of the Xzistor Concept version of the Volksbot here.
See some videos of the Xzistor Concept version of the Volksbot here.
More about the Volksbot
As stated on the website www.volksbot.de, the Volksbot is a fast prototyping robotic platform, a chassis basically on top of which sensors, structures, grab arms and camera systems can be mounted. It was developed by the Fraunhofer Institute IAIS (Intelligente Analyse- un Informationssysteme) group.