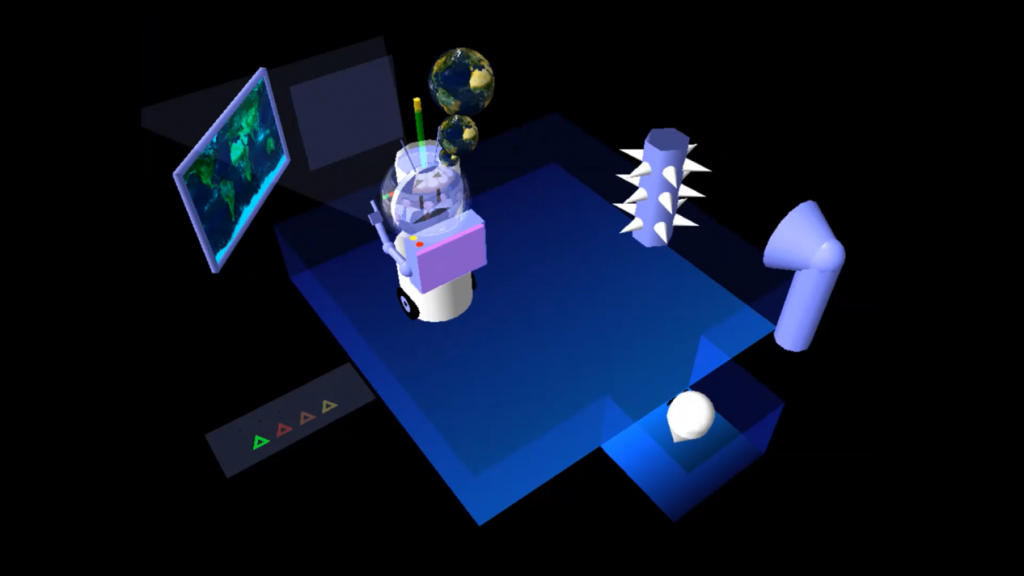
Here is a picture gallery showing Simmy. Simmy is a 3D Virtual robot living inside a C++/OpenGL simulation – where he can experience both cognition and emotions. Below we see Simmy in different situations in his square learning confine.
Note: Keep in mind that the square Learning Confine has in fact colour panels similar to Troopy’s physical circular confine, but I hide these from view so that they are only visible to the 3D agent in the simulation.
Enjoy!
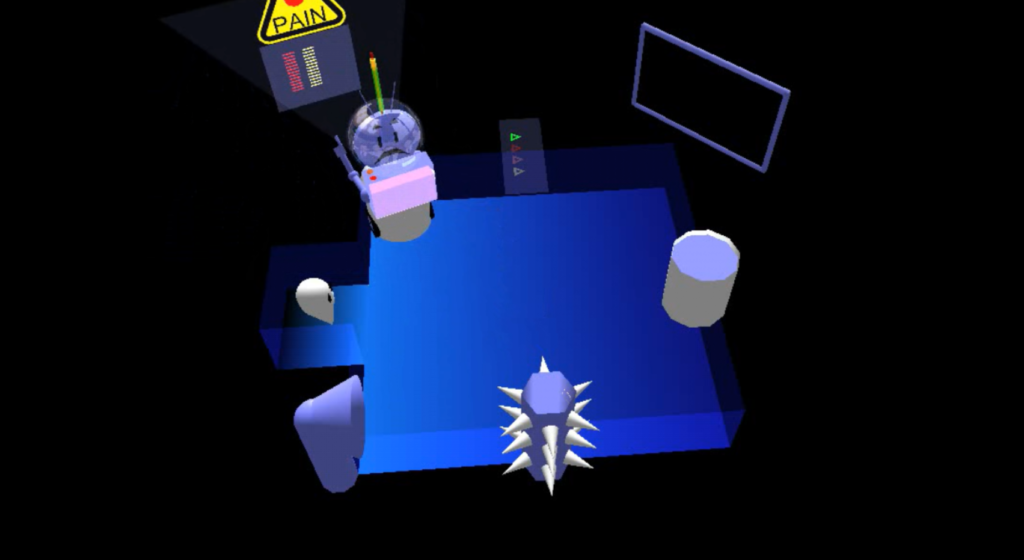
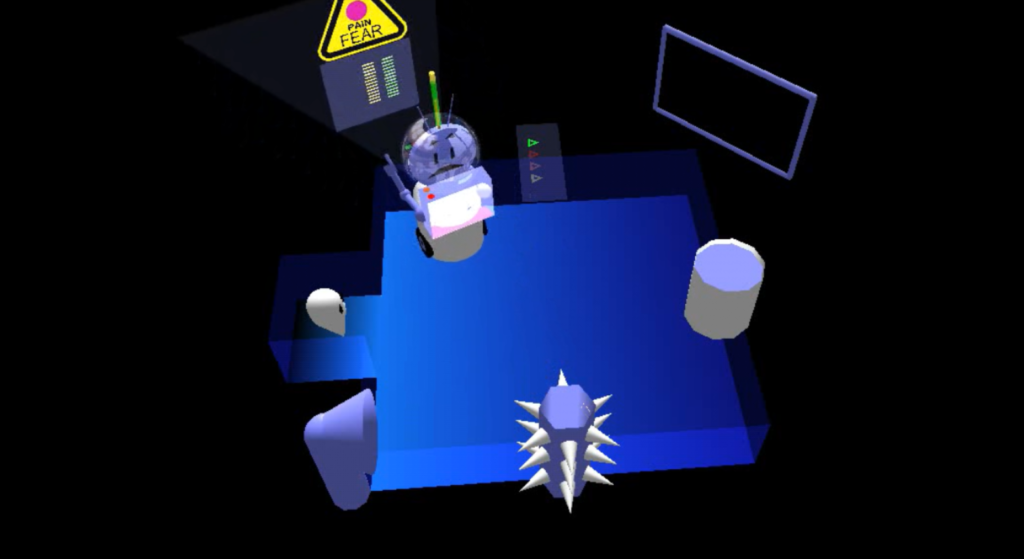
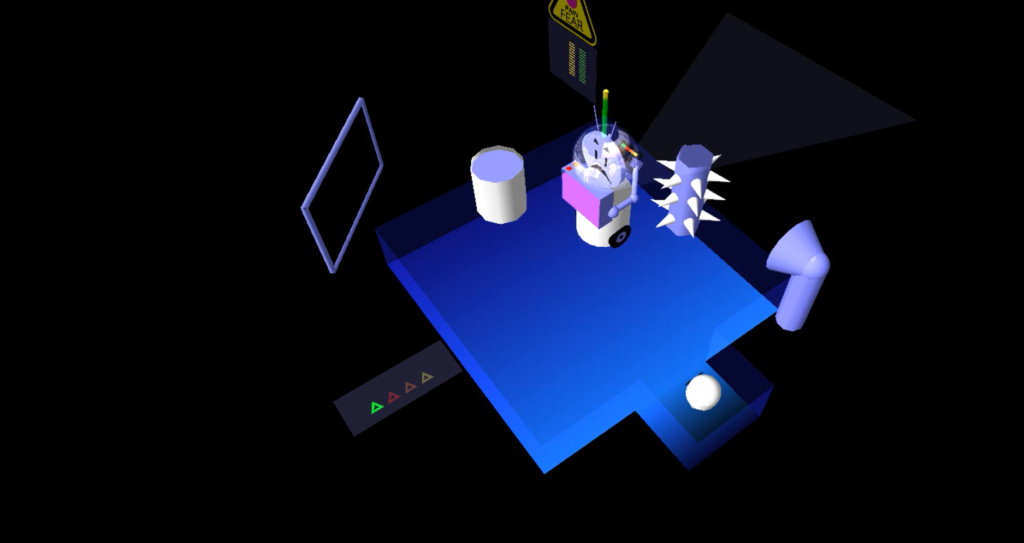
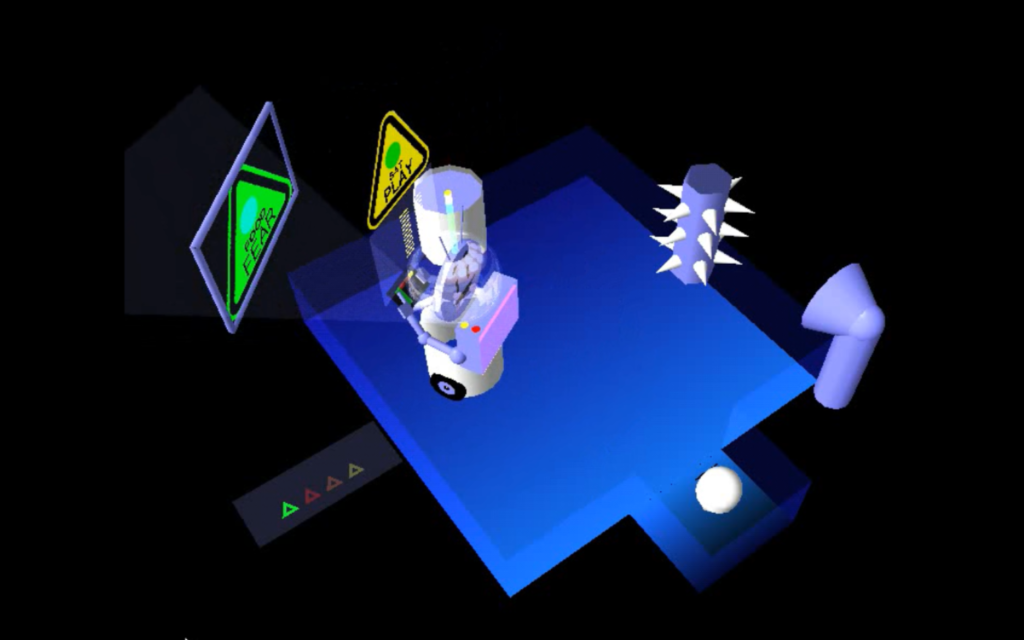
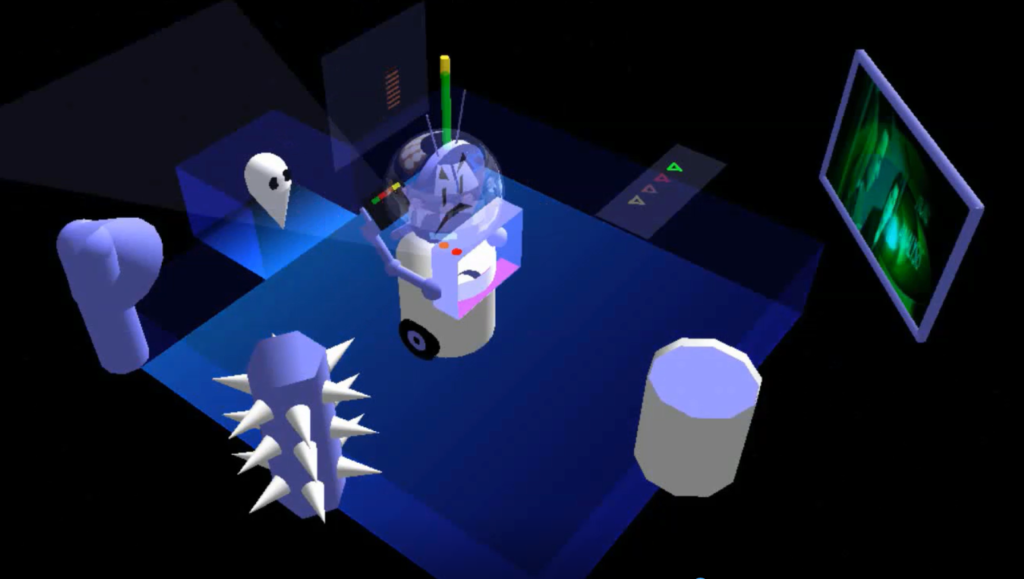
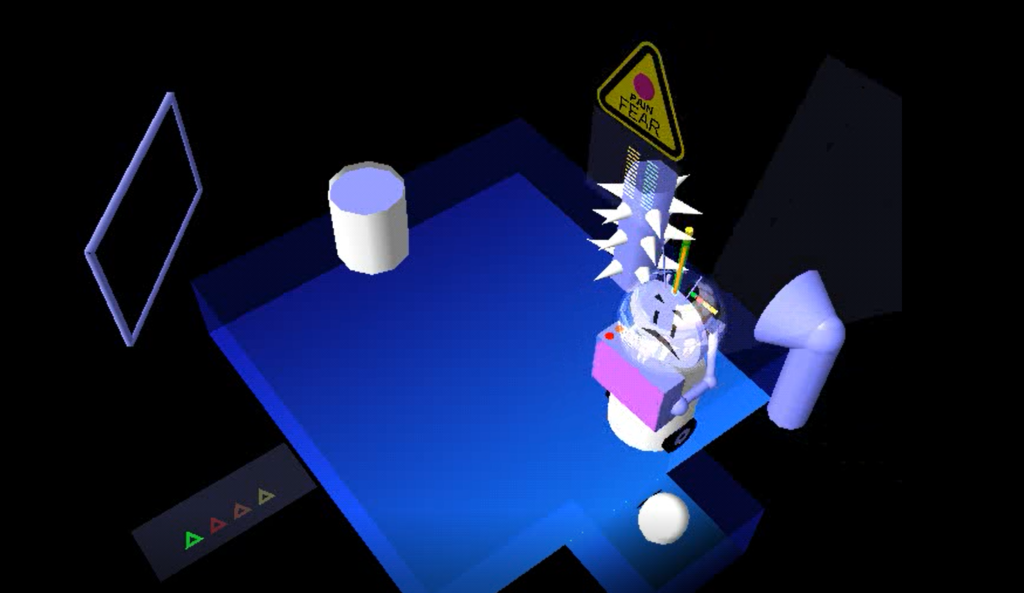
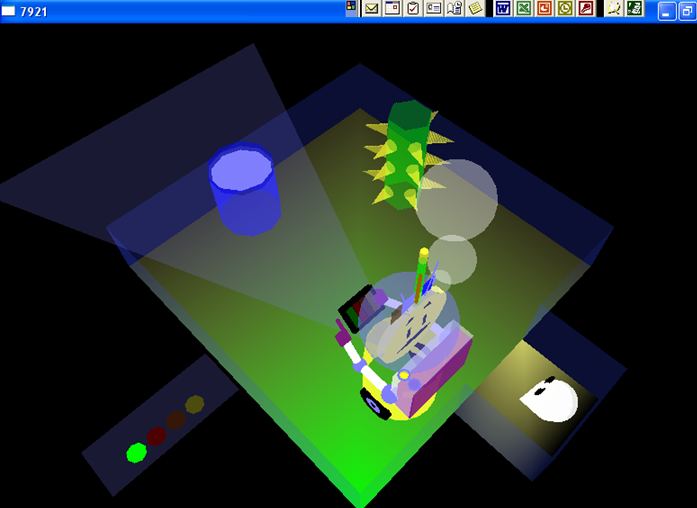
We can make Simmy avoid wrong behaviours by shouting NO! (indicated by a RED sound cone). First we have to put Simmy through a set of learning opportunities where he starts to associated the NO! command with bad emotions which will trigger the correct avoidance behaviours. The agony of bumping into the wall (but the only way to learn!). Simmy hits the wall as confirmed by the head-mounted ‘proximity’ meter (looks like thermometer). Observe Simmy’s unhappy facial expression borne off of his pain state. Overhead panel shows max pain(RED bars) and future emotions about this incident being processed for association-forming (brown bars). Here is another pic where we can see Simmy bumping into the side of the Learning Confine and the emotion panel clearly indicates the word PAIN. He will feel this pain as real as any robot in the physical world would. He will also experience the wall as a rock hard obstruction that he cannot pass through even though it only exists in software…Here we steered Simmy back to the same piece of Learning Confine wall shortly after his painful encounter and we can see even before he gets too close he starts to experience fear – look at the words PAIN FEAR (to discern it from many other types of fears) . Much of Xzistor-type robot behaviours are driven by fear – just like humans!Simmy before starting to get hungrySimmy playing with his ball in his Learning Confine. Playing is an important instinctive behaviour to get the robot to explore and learn about his environment.Not very clear, but on the yellow overhead Emotional Panel (partially truncated) the words PAIN and FEAR can be seen. This indicates that Simmy is experiencing fear when coming close to and looking at the cactus – based on a previous painful encounter. He should be happy with his back-pack full of Purple Power Juice, but we can see a very unhappy facial expression due to the fear it is experiencing.Here we see Simmy after learning to push the GREEN button on his control panel to switch on the TV.Here we see Simmy reversing away from the ‘ghost’ and the fear can be seen (BROWN bars on overhead emotion panel). Here we demonstrated phobia or instinctive fear – not related to a pain experience. Simmy actually just ‘sees’ a black panel where the ghost is (just like Troopy) – and does not ‘object recognise’ the ghost details at this stage.Here we see another type of fear – see words on yellow emotion panel PHOBIA FEAR. This fear is triggered simply by seeing darkness (like Troopy, Simmy sees only a black panel – no ghost) and the fear is triggered by instinct and not from a bad experience.Look at the overhead emotion panel (yellow triangle). Here we clearly see fear caused by a previous pain experience (obviously from bumping into the wall). He is reversing away on this instance and the GREEN emotion bars equate to ‘relief’!!A legacy pic showing how long I have been working on the Simmy simulation (note the Microsoft icons top right of the picture!). These were early days – but came long after development of the Xzistor Concept brain model. This is Neanderthal Simmy! Love this little bot!
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.AcceptPrivacy policy